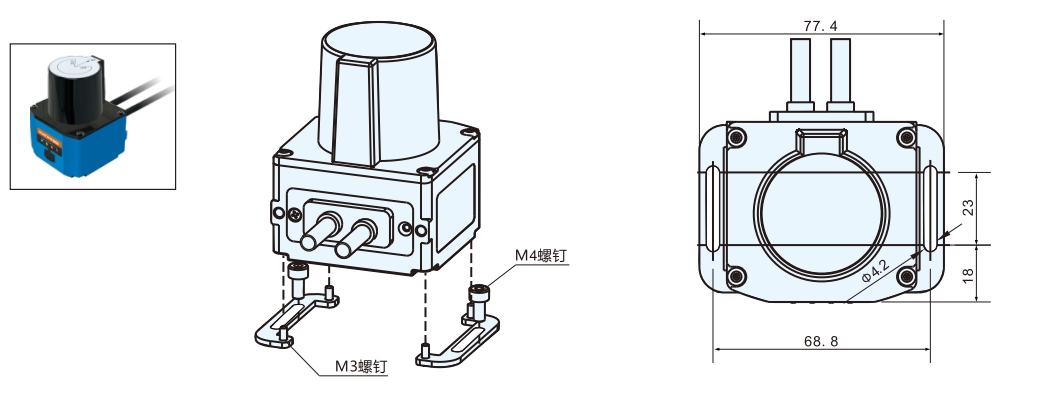
M3螺丝轻松安装!
M2螺丝或者M3螺丝可轻松安装。
(M2螺丝或者M3螺丝・垫圈等请另外单独准备。)
- ■ M2或者M3螺丝1点固定 : PM-F25、PM-R25
- ■ M2或者M3螺丝2点固定 : 除上述以外的其他机种
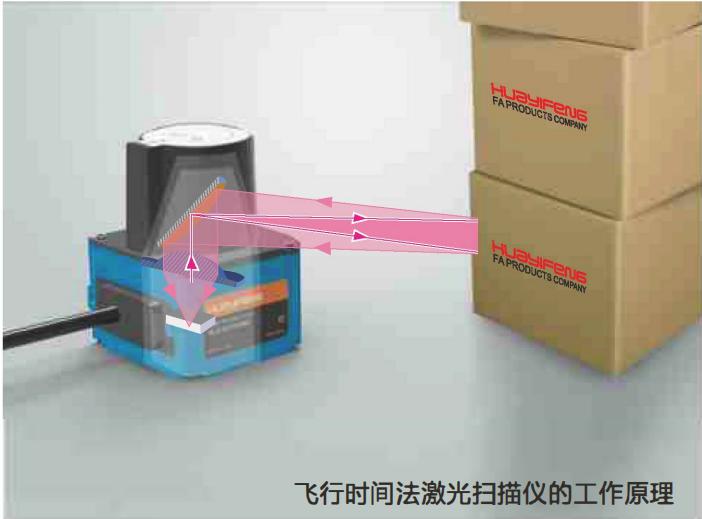
检测原理
TOF(Time of Flight)方式, 以激光反射回来的时间测量距离。
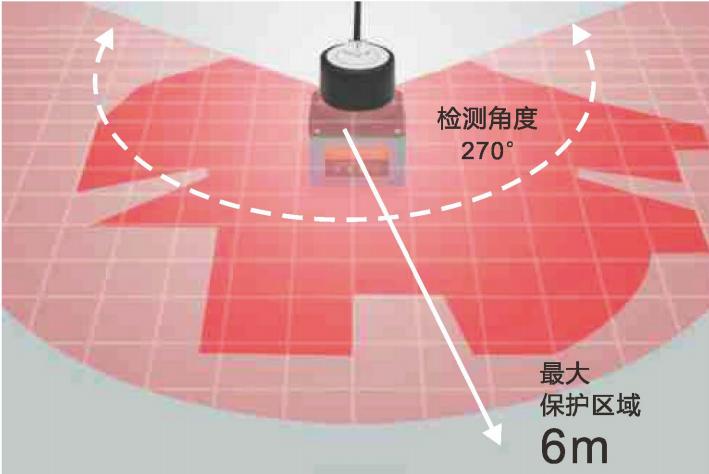
保护大范围
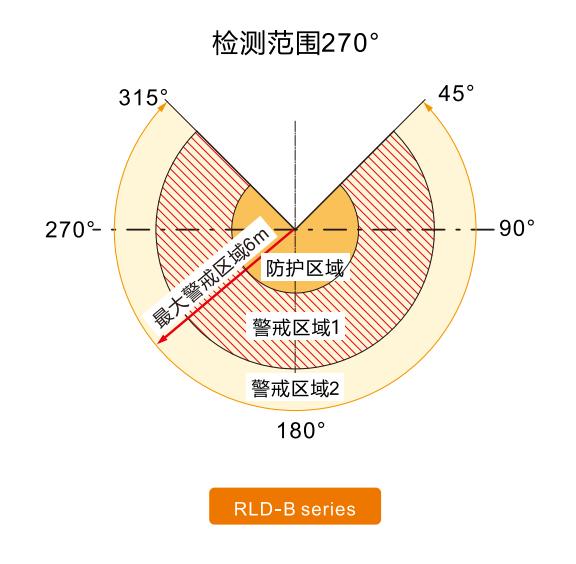
多种保护区域, 最大保护区域6m, 检测角度270°
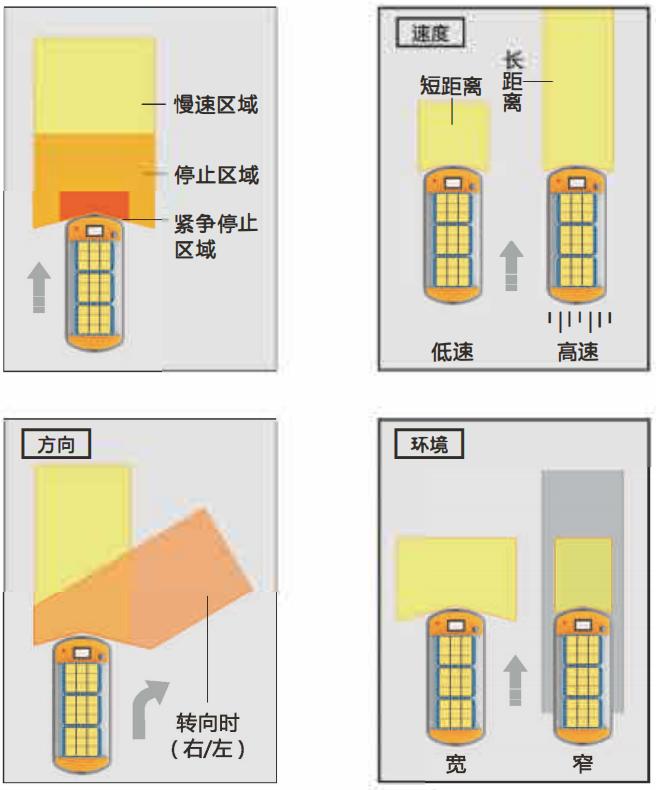
可以切换多个保护区域
可以通过遥控输入选择多个区域(保护区域甩扛戈区域)。每个区域组中可设定1个保护区域、 2个警戒区域共计3个区域。可设置96个区域(最多可设置32区域组、 各3个区域)
用激光扫描仪轻松实现区域设置
激光扫描仪可以轻松设置保护区域和警戒区域因此可以安装在各种位置。